Advanced Features
Added Mass
Theoretical Implementation
Added mass is a special multi-directional fluid dynamic phenomenon that most physics software cannot account for well. Modeling difficulties arise because the added mass force is proportional to acceleration. However most time-domain simulations are attempting to use the calculated forces to determine a body’s acceleration, which then determines the velocity and position at the next time step. Solving for acceleration when forces are dependent on acceleration creates an algebraic loop.
The most robust solution is to combine the added mass matrix with the rigid body’s mass and inertia, shown in the manipulation of the governing equation below:
where \(F_{am} = -A\ddot{X_i}\) is the added mass component of the radiation force that is pulled out of the force summation for manipulation, \(M\) is the mass matrix, \(A\) is the single frequency or infinite frequency added mass, and subscript \(i\) represents the timestep being solved for. In this case, the adjusted body mass matrix is defined as the sum of the translational mass (\(m\)), inertia tensor (\(I\)), and the added mass matrix:
This formulation is desirable because it removes the acceleration dependence from the right hand side of the governing equation. Without this treatment, the acceleration causes an unsolvable algebraic loop. There are alternative approximations to solve the algebraic loop, but simulation robustness and stability become increasingly difficult.
The core issue with this combined mass formulation is that Simscape Multibody, and most other physics software, do not allow a generic body to have a degree-of-freedom specific mass. For example, a rigid body can’t have one mass for surge motion and another mass for heave motion. Simscape rigid bodies only have one translational mass, a 1x3 moment of inertia matrix, and 1x3 product of inertia matrix.
Note that the body mass used to define the gravitational force is not adjusted as gravity does not act on any added mass contributions. The gravity force will always depend on the unadjusted body mass. The gravity force is lumped with the sum of remaining forces in the rest of this section for simplicity.
WEC-Sim’s Implementation
Due to this limitation, WEC-Sim cannot combine the body mass and added mass on the left-hand side of the equation of motion (as shown above). The algebaric loop can be solved by predicting the acceleration at the current time step, and using that to calculate the added mass force. But this method can cause numerical instabilities. Instead, WEC-Sim decreases the added mass force magnitude by moving some components of added mass into the body mass, while a modified added mass force is calculated with the remainder of the added mass coefficients.
There is a 1-1 mapping between the body’s inertia tensor and rotational added mass coefficients. These added mass coefficients are entirely lumped with the body’s inertia. Additionally, the surge-surge (1,1), sway-sway (2,2), heave-heave (3,3) added mass coefficients correspond to the translational mass of the body, but must be treated identically.
WEC-Sim implements this added mass treatment by adding a change in mass matrix (\(dM\)) to both sides of the equation, creating both a modified added mass matrix and a modified body mass matrix:
where \(dM\) is the change in added mass and defined as:
The resultant definition of the body mass matrix and added mass matrix are then:
Note
The inertia tensor is symmetric, so we should see that \(A_{4,5} - A_{5,4} = A_{4,6} - A_{6,4} = A_{5,6} - A_{6,5} = 0\). There may be numerical differences in the added mass coefficients which are preserved.
Though the components of added mass and body mass are manipulated in WEC-Sim, the total system is unchanged. This manipulation does not affect the governing equations of motion, only the implementation.
The scale of translational added mass that is moved into the body mass is determined by body(iBod).adjMassFactor, whose default value is \(2.0\).
Advanced users may change this weighting factor in the wecSimInuptFile to create the most robust simulation possible.
To see its effects, set body(iB).adjMassFactor = 0 and see if simulations become unstable.
This manipulation does not move all added mass components.
WEC-Sim still contains an algebraic loop due to the dependence of the remaining added mass force \(A_{adjusted}\ddot{X_i}\), and components of the Morison Element force.
WEC-Sim solves the algebraic loop using a Simulink Transport Delay with a very small time delay (1e-7).
This blocks extrapolates the previous acceleration by 1e-7 seconds, which results in a known acceleration for the added mass force.
The small extrapolation solves the algebraic loop but prevents large errors that arise when extrapolating the acceleration over an entire time step.
This will convert the algebraic loop equation of motion to a solvable one:
Body-to-body Interactions
The above implementation extends readily to the case where there are body interactions to account for. In this example, we assume there are two bodies with body interaction. Then the right hand side added mass and acceleration matrices above are (without generalized modes) of size 6x12 and 12x1 respectively. Note that in this subsection the subscript on acceleration and added mass now refers to the body number to differentiate between the acceleration and added mass matrices of different bodies.
With body interactions, the derivation for the added mass adjustment for body 1 is:
So when body-to-body interactions are considered, the term \(dM\) is still only dependent on and only affects the added mass of the body in question (e.g. body 1 above).
Working with the Added Mass Implementation
WEC-Sim’s added mass implementation should not affect a user’s modeling workflow.
WEC-Sim handles the manipulation and restoration of the mass and forces in the bodyClass functions bodyClass.adjustMassMatrix() called by initializeWecSim and bodyClass.restoreMassMatrix(), bodyClass.storeForceAddedMass() called by postProcessWecSim.
However viewing body.hydroForce.hf*.fAddedMass between calls to initializeWecSim and postProcessWecSim will not show the values from the BEM dataset.
See the following table for the variables containing both unadjusted and adjusted parameters after the simulation:
Parameter |
Nominal value |
Adjusted value |
|---|---|---|
Mass |
|
|
Inertia |
|
|
Inertia Products |
|
|
Added mass coefficients |
|
|
Added mass force timeseries |
|
|
Total force timeseries |
|
|
The nominal (unadjusted) body mass is stored in body.hydroForce.hf*.mass.
This nominal value is retained during the simulation because it is required for the calculation of the gravitational force.
However, in the case that a user wants to view the added mass force during a simulation (typically during debugging in a failed simulation),
the change in mass, \(dM\) above, must be taken into account.
Refer to how body.calculateForceAddedMass() calculates the entire added mass force in WEC-Sim post-processing.
When using variable hydrodynamics, the added mass matrix and mass matrix can change with the varying state. In the above derivation, all values of \(dM\), mass matrix, inertia matrix, added mass force, and the resultant adjusted mass and added mass matrices are calculated for each hydrodynamic dataset. Note that varying any part of the body mass matrix with variable hydro requires using a special simscape block. Refer to the variable hydrodynamics applications.
Note
Depending on the wave formulation used, \(A\) can either be a function of wave frequency \(A(\omega)\), or equal to the added mass at infinite wave frequency \(A_{\infty}\)
Morison Element
As a reminder from the WEC-Sim Theory Manual, the Morison force equation assumes that the fluid forces in an oscillating flow on a structure of slender cylinders or other similar geometries arise partly from pressure effects from potential flow and partly from viscous effects. A slender cylinder implies that the diameter, \(D\), is small relative to the wave length, \(\lambda\), which is generally satisfied when \(D/\lambda<0.1-0.2\). If this condition is not met, wave diffraction effects must be taken into account. Assuming that the geometries are slender, the resulting force can be approximated by a modified Morison formulation for each element on the body.
Fixed Body
For a fixed body in an oscillating flow the force imposed by the fluid is given by:
where \(\vec{F}_{ME}\) is the Morison element hydrodynamic force, \(\rho\) is the fluid density, \(\forall\) is the displaced volume, \(C_{m}\) is the inertia coefficient, \(A\) is the reference area, \(C_{D}\) is the drag coefficient, and \(u\) is the fluid velocity. The inertia coefficient is defined as:
where \(C_{a}\) is the added mass coefficient. The inertia term is the sum of the Froude- Krylov Force, \(\rho \forall \dot{u}\), and the hydrodynamic mass force, \(\rho C_{a} \forall \dot{u}\). The inertia and drag coefficients are generally obtained experimentally and have been found to be a function of the Reynolds (Re) and Kulegan Carpenter (KC) numbers
where \(U_{m}\) is the maximum fluid velocity, and \(\nu\) is the kinematic viscosity of the fluid, and \(T\) is the period of oscillation. Generally when KC is small then \(\vec{F}\) is dominated by the inertia term when the drag term dominates at high KC numbers. If the fluid velocity is sinusoidal then \(u\) is given by:
where \(\sigma = 2\pi/T\). This can be taking further by considering the body is being is impinged upon by regular waves of the form:
where \(\eta\) is the wave elevation, \(\phi_{I}\) is the incident wave potential, \(A\) is the wave amplitude, \(k\) is the wave number (defined as \(k=\frac{2\pi}{\lambda}\) where \(\lambda\) is the wave length), \(g\) is gravitational acceleration, \(h\) is the water depth, \(z\) is the vertical position in the water column, \(\theta\) is the wave heading. The fluid velocity can then be obtained by taking the graident of Eqn. (5) :
The acceleration of the fluid particles will then be obtained by taking the time derivative of Eqn. (6) :
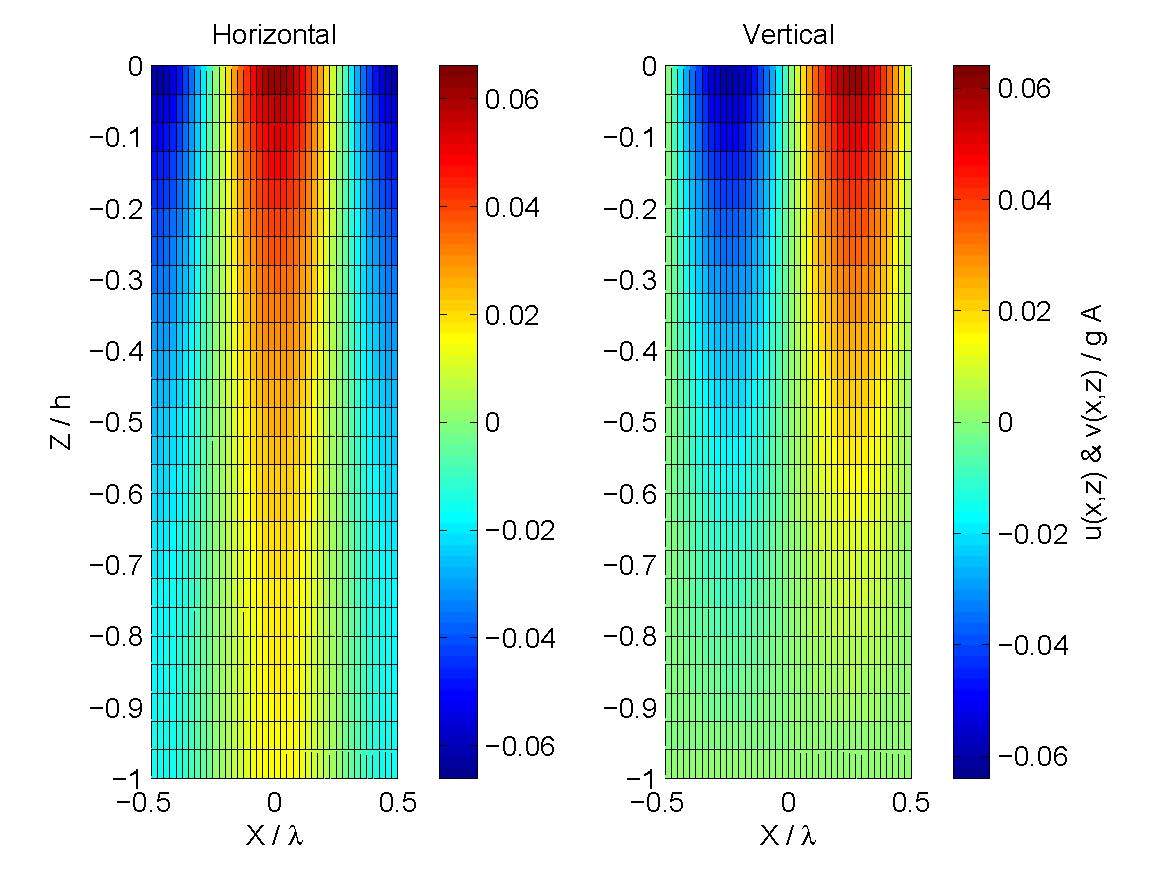
Horizontal and vertical orbital velocity magnitude for a wave period of 10 s and water depth of 50 m with a wave heading of 0 rads.
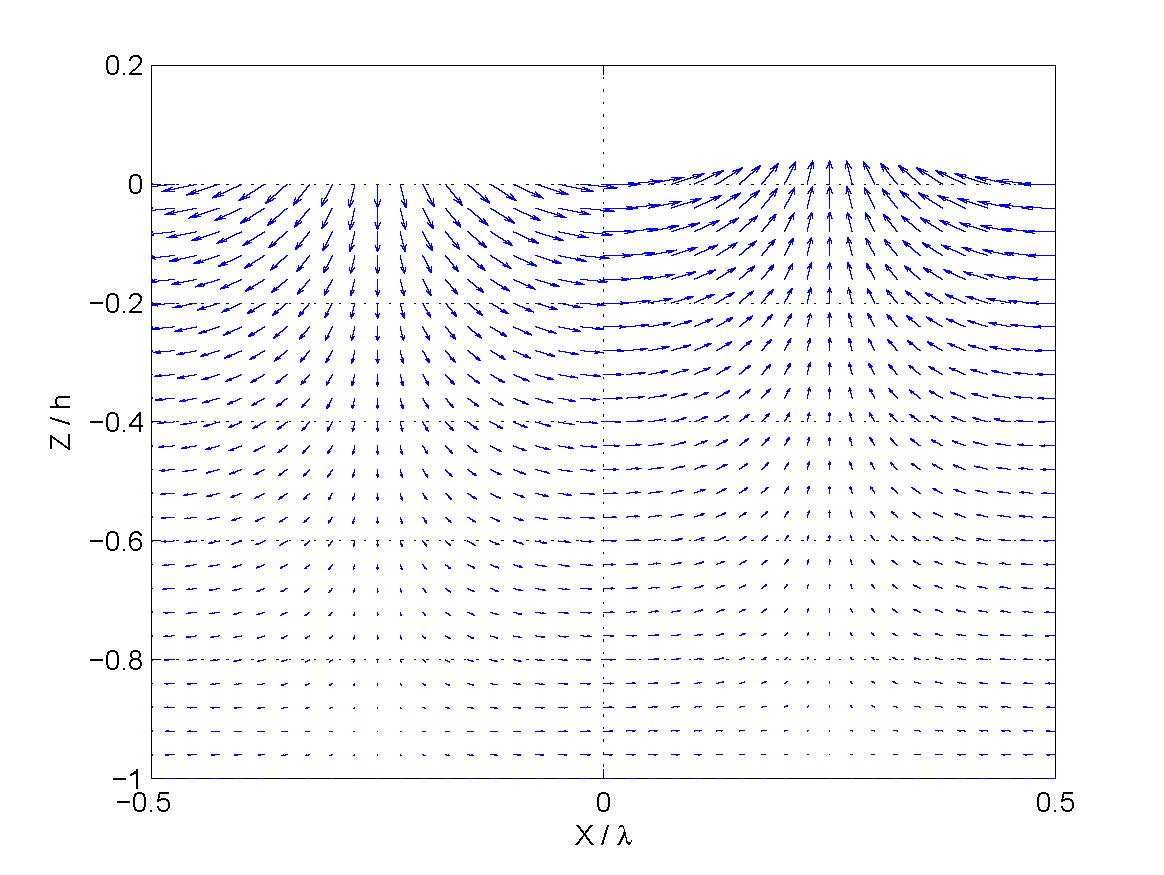
Orbital velocity magnitude vectors for a wave period of 10 s and water depth of 50 m with a wave heading of 0 rads.
Moving Body
If the body is allowed to move in an oscillating flow then Eqn. (1) must be adjusted as follows:
where \(U\) is the body velocity. In the calculations performed by WEC-Sim, it is assumed that the body does not alter the wave field and the fluid velocity and acceleration can be calculated from the incident wave potential as from Eqn. (6) and (7).
Review of Rigid Body Dynamics
A rigid body is an idealization of a solid body in which deformation is neglected. In other words, the distance between any two given points of a rigid body remains constant in time regardless of external forces exerted on it. The position of the whole body is represented by its linear position together with its angular position with a global fixed reference frame. WEC-Sim calculates the position, velocity, and acceleration of the rigid body about its center of gravity; however, the placement of each morrison element will have a different local velocity that affects the fluid force. The relative velocity between point A and point B on a rigid body is given by:
where \(\omega\) is the angular velocity of the body and \(\times\) denotes the cross product. Taking the time derivative of Eqn. (9) provides the relative acceleration:
WEC-Sim Implementations
As discussed in the WEC-Sim user manual, there are two options to model a Morison element(s) and will be described here in greater detail so potential developers can modify the code to suit their modeling needs.
Option 1
In the first Morison element implementation option, the acceleration and velocity of the fluid flow are estimated at the Morison point of application, which can include both wave and current contributions, and then subtracts the body acceleration and velocity for the individual translational degrees of freedom (x-, y-, and z-components). The fluid flow properties are then used to calculate the Morison element force, indepenently for each degree of freedom, as shown by the following expressions:
where \(r_{g}\) is the lever arm from the center of gravity of the body to the Morison element point of application. Option 1 provides the most flexibility in setting independent Morison element properties for the x-, y-, and z-directions; however, a limitation arises that the fluid flow magnitude does not consider the other fluid flow components. Depending on the simulation enviroment this approach can provide the same theoretical results as taking the magnitude of the x-, y-, and z-components of the fluid flow, but is case dependent. A comparison between the outputs of Option 1 and Option 2 can be found later in the Developer Manual Morison Element documentation.
Option 2
The WEC-Sim Option 1 implementation solves for the of the Morison element force from the individual x-, y-, and z-components of the relative flow velocity and acceleration; however, this results in incorrect outputs at certain orientations of the flow and Morison Element. As opposed to solving for the x-, y-, and z-components of the Morison element force, the force can be calculated relative to the magnitude of the flow and distributed among its unit vector direction. Therefore the approach used in Option 2 is to decompose the fluid and body velocity and acceleration into tangential and normal components of the Morison element, as depicted in Figure Schematic of the water flow vector decomposition reletive to the Morison Element orientation.
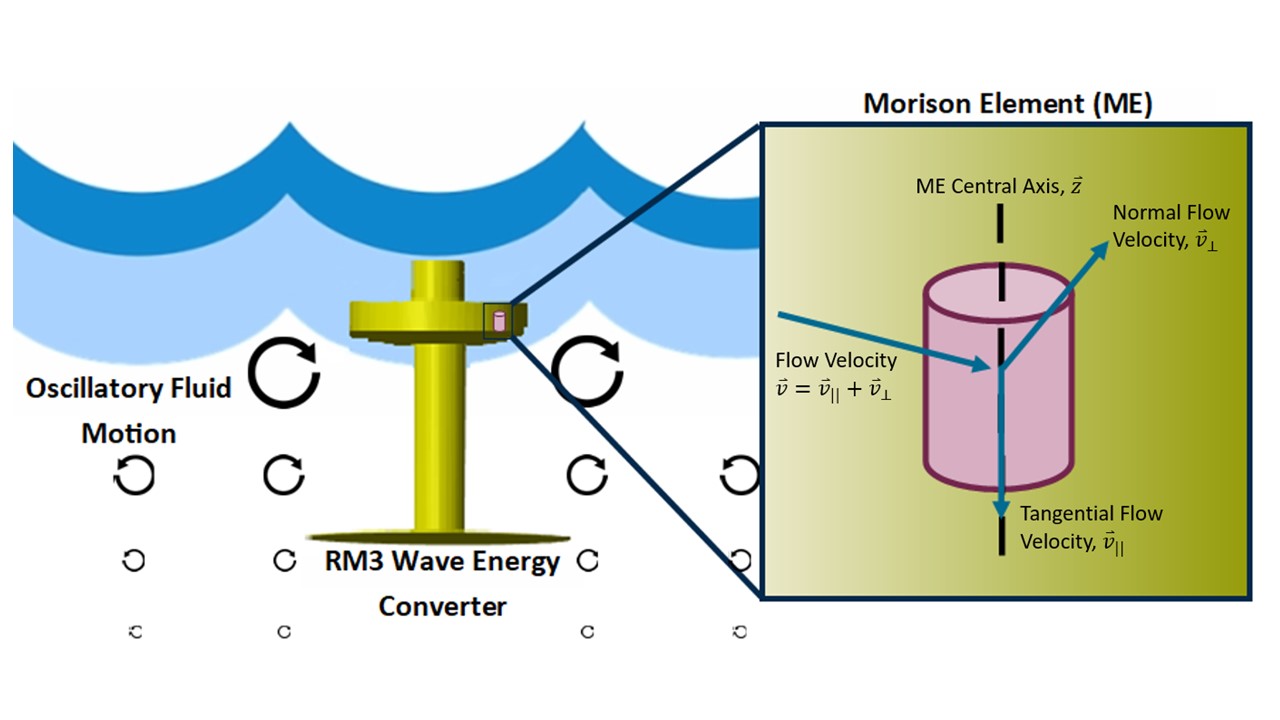
Schematic of the water flow vector decomposition reletive to the Morison Element orientation.
In mathematics, for a given vector at a point on a surface, the vector can be uniquely decomposed into the sum of its tangential and normal components. The tangential component of the vector, \(v_{\parallel}\), is parallel to the surface while the normal component of the vectors, \(v_{\perp}\), is perpendicular to the surface which is used in relation to the central axis to the Morison element. The WEC-Sim input file was altered to consider a tangential and normal component for the drag coefficient [\(C_{d\perp}\) , \(C_{d\parallel}\)] , added mass coefficient [\(C_{a\perp}\) , \(C_{a\parallel}\)], characteristic area [\(A_{\perp}\) , \(A_{\parallel}\)], and the central axis vector of the ME = [ \(\vec{z} = `:math:`z_{x}\) , \(z_{y}\) , \(z_{z}\) ].
A general vector, \(\vec{k}\), can be decomposed into the normal component as a projection of vector k on to the central axis z as follows:
As the vector \(\vec{k}\) is uniquely decomposed into the sum of its tangential and normal components, the normal component can be defined as the difference between the vector \(\vec{k}\) and its tangential component as follows:
Using this vector multiplication, the tangential and normal components of the fluid flow can be obtained as follows:
The Morison element force equation for a moving body relative to the fluid flow is modified to include the following decomposition of force components and consider the magnitude of the flow:
Comparison of Performance Between Option 1 and Option 2
A simple test case, which defines a Morison element as vertical and stationary relative to horizontal fluid flow, was built to compare the Morison element force calculation between Option 1 and Option 2 within WEC-Sim. Theoretically, the magnitude of the Morison element force should remain constant as the orientation of the flow direction is rotated in the X-Y plane. The MF was calculated as the orientation of the flow was rotated about the z-axis from 1 to 360 degrees where the central axis of the ME is parallel wtih the z-axis. The remaining WEC-Sim input values for the simulation can be found in the following table.
Variable Type |
Variable Symbol |
WEC-Sim Input Values |
ME Central Axis |
\(\vec{z}\) |
[0, 0 , 1] |
Fluid flow velocity |
\(\vec{U}\) |
[-1, 0, 0] \(m/s\) |
Fluid flow acceleration |
\(\vec{\dot{U}}\) |
[-1, 0, 0] \(m/s^{2}\) |
Drag Coefficient |
\(C_{D}\) |
[1, 1, 0] |
Mass Coefficient |
\(C_{a}\) |
[1, 1, 0] |
Area |
\(A\) |
[1, 1, 0] |
Density |
\(\rho\) |
1000 \(kg/m^{3}\) |
Displaced Volume |
\(\forall\) |
0.10 \(m^{3}\) |
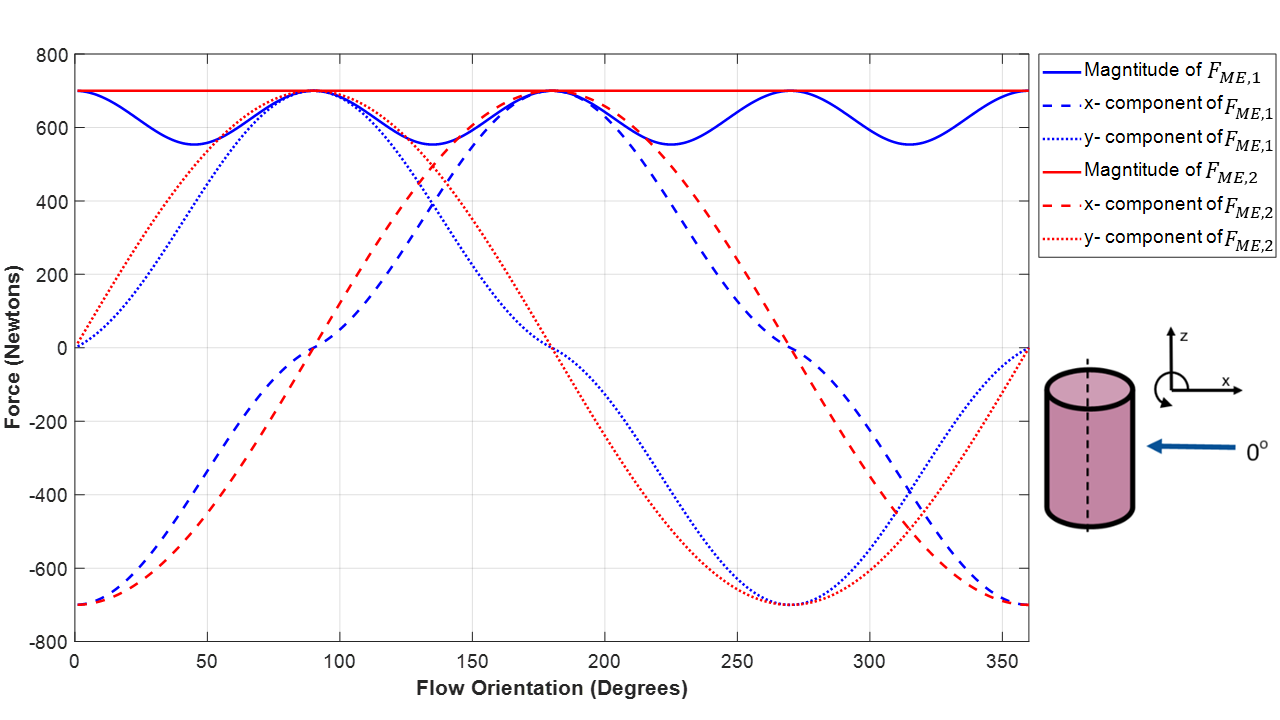
Graphical representation of the comparison between ME Option 1 and Option 2 within WEC-Sim.
\(F_{ME,1}\) and \(F_{ME,2}\) is the Morison element force output from Option 1 and Option 2 within WEC-Sim, respectively. Shown in the above figure, in Option 1 there is an oscillation in Morison element magnitude with flow direction while Option 2 demonstrates a constant force magnitude at any flow direction. The reason behind this performance is that Option 1 solves for the MF individually using the individual the x-, y-, and z- components of the flow while Option 2 calculates the force relative to the flow magnitude and distributed among the normal and tangential unit vectors of the flow.
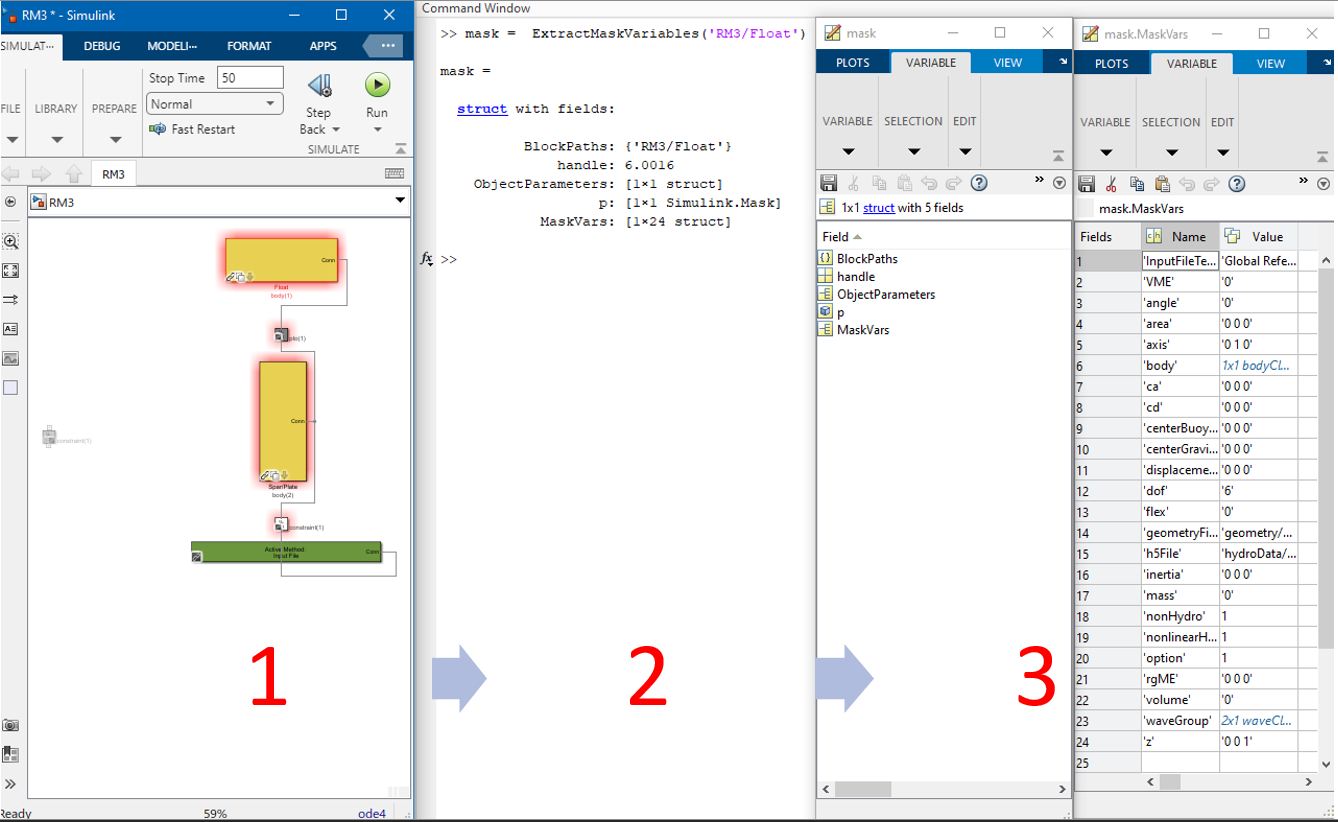
Extract Mask Variables
The Simulink variable workspace is inaccesible in the MATLAB workspace by default.
Simulink variables can be imported to the MATLAB workspace using the block handle
of the Simulink block being probed. The block parameters can be used by developers
to programmatically set block parameters by being able to access the unique tags
that Simulink uses for a particular block parameter. This is also useful for the code
initialization of Simulink mask blocks.
The function ExtractMaskVariables()
located in sourcefunctionssimulinkmask, can be used to extract the block
parameters in following steps,
Open the pertinent Simulink model,
Run the function with the address of the block being probed as the argument,
Explore the
maskdata structure in the MATLAB workspace.
Variable Hydrodynamics
The variable hydrodynamics implementation was created to make the minimal number of alterations to, and best fit WEC-Sim’s previous pre-processing structure:
h5FileInstead of initializing the body class with one string (one H5 file name), a cell array of strings can be passed, e.g
body(1) = bodyClass({'H5FILE_1.h5','H5FILE_2.h5','H5FILE_3.h5');
hydroDataEach H5 file is processed into a hydroData structure. All structs are concatenated into
hydroDatawhich is now an array of structures instead of one struct.
hydroForceIdeally, hydroForce would also be a structure array becuase the format is clean, easy to understand, and easy to index into. However, all information in
hydroForceneeds to be loaded into Simulink at run time. Structure arrays cannot be loaded into Simulink in this way. So,hydroForceis a nested structure containinghf1,hf2, …hfn. Each instance of hf1, hf2, etc is an identical structure that contains hydrodynamic force coefficients that are applied at runtime. A custom bus is created usingstruct2bus.mto map all hydroForce data into Simulink.
The scenario being modeled, state changed, signals used to vary hydrodynamics, and the user logic is completely undefined so as to not artifically restrict the applicability of variable hydrodynamics.
The method of loading in many distinct sets of BEM data provides some flexibility to the implementation, but it does not allow for instantaneous interpolation between datasets. In some instances this will speed up simulations, for example compared to passive yaw in irregular waves. However the limitation of this method is that switching between BEM datasets can become noisy and unstable, requiring a very fine discretization of BEM datasets input to WEC-Sim.