Overview
WEC-Sim (Wave Energy Converter SIMulator) is an open-source software for simulating wave energy converters. It is developed in MATLAB/SIMULINK using the multi-body dynamics solver Simscape Multibody. WEC-Sim has the ability to model devices that are comprised of hydrodynamic bodies, joints and constraints, power take-off systems, and mooring systems. Simulations are performed in the time-domain by solving the governing wave energy converter equations of motion in the 6 rigid Cartesian degrees-of-freedom. A body may also contain any number of generalized body modes to represent hydrodynamic effects in shear, torsion, bending, and others.
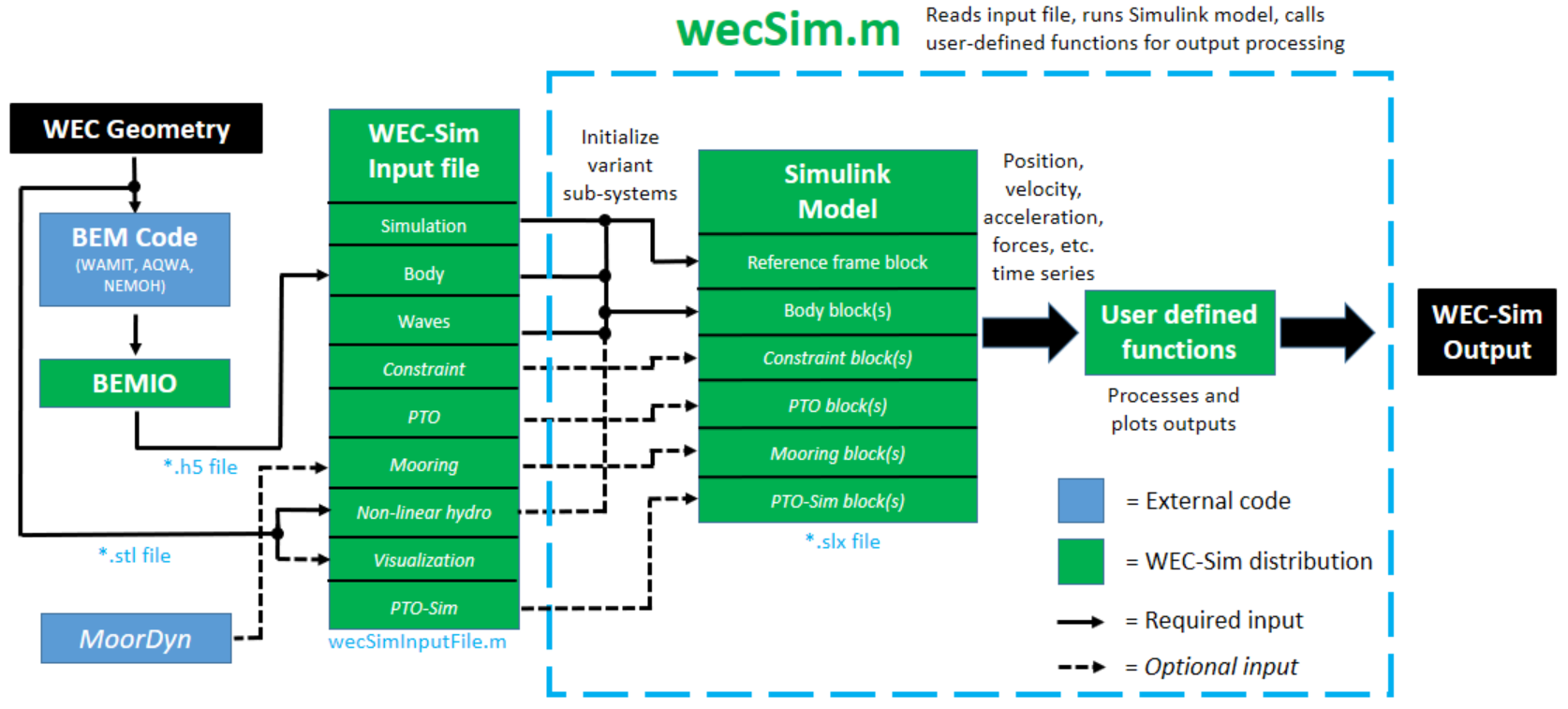
At a high level, the only external input WEC-Sim requires is hydrodynamic data from boundary element method (BEM) software such as WAMIT, NEMOH, Aqwa, and Capytaine. The boundary element method data represents the hydrodynamic response of the device for a given wave frequency. WEC-Sim uses this data to simulate devices in the time-domain where they can be coupled with controls, power take-off systems, and other external bodies and forces. WEC-Sim outputs the motions, forces, and power for individual bodies, joints and PTOs in MATLAB for custom post-processing or coupling with external tools.
Several interfaces with Simulink are included that allow users to couple WEC-Sim with a wide variety of other models and scripts relevant to their devices. Complex power take-off systems and advanced control algorithms are just two examples of the advanced tools that can be coupled with WEC-Sim.
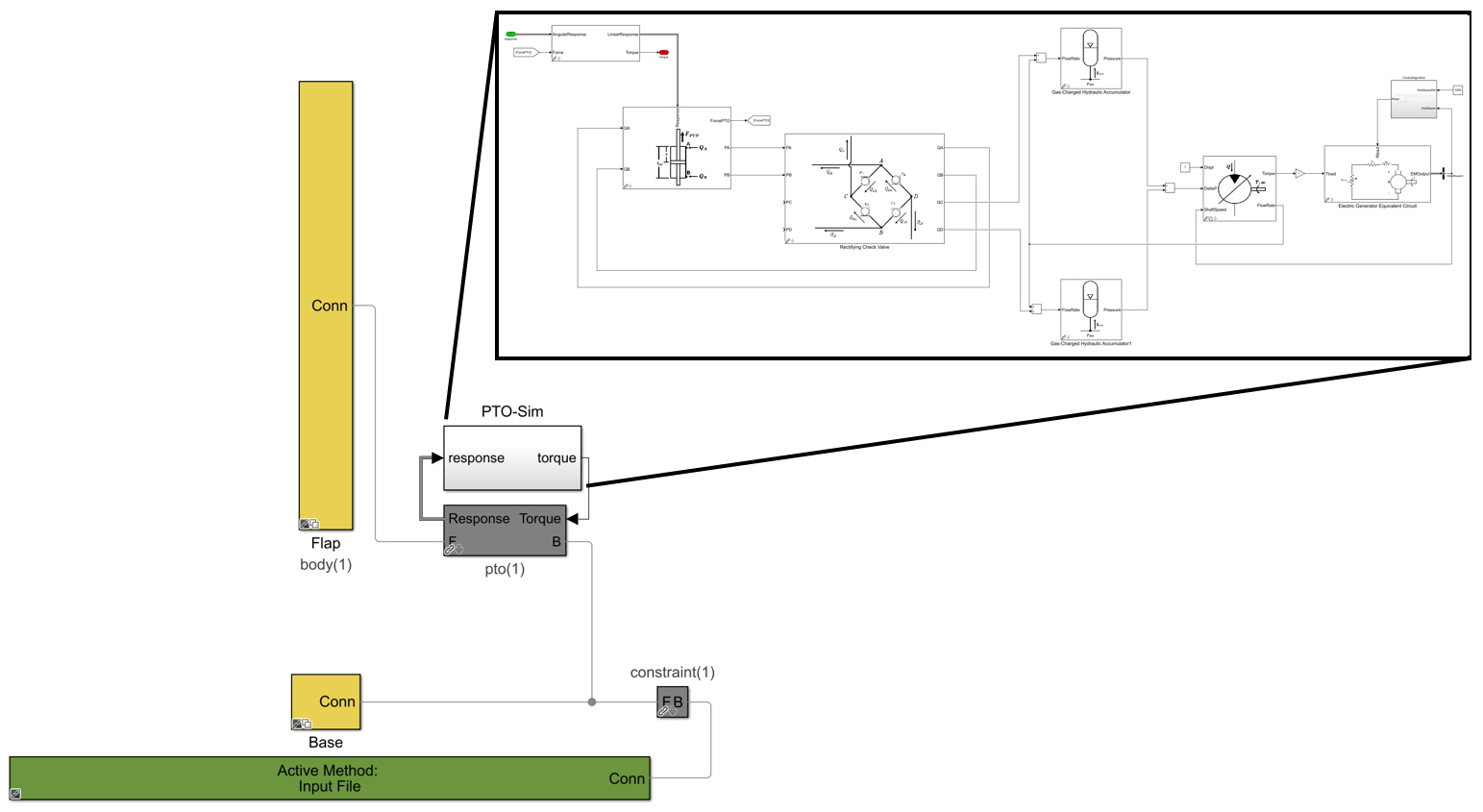
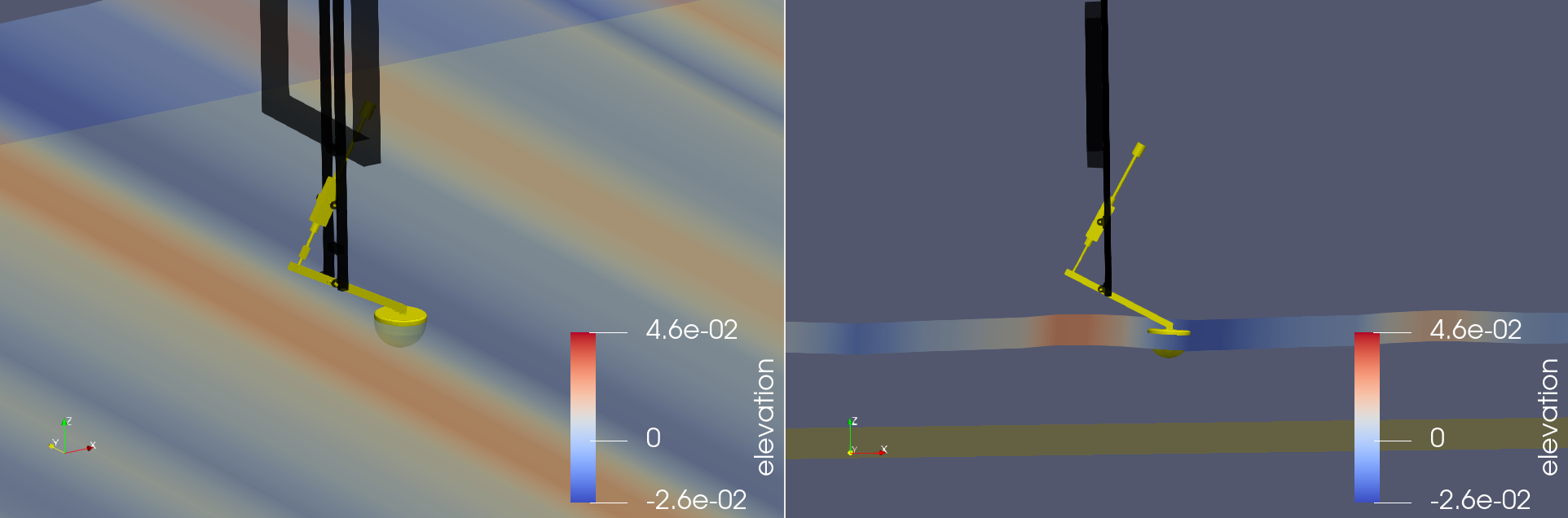
Block diagram of an OSWEC device with hydraulic PTO created with PTO-Sim.
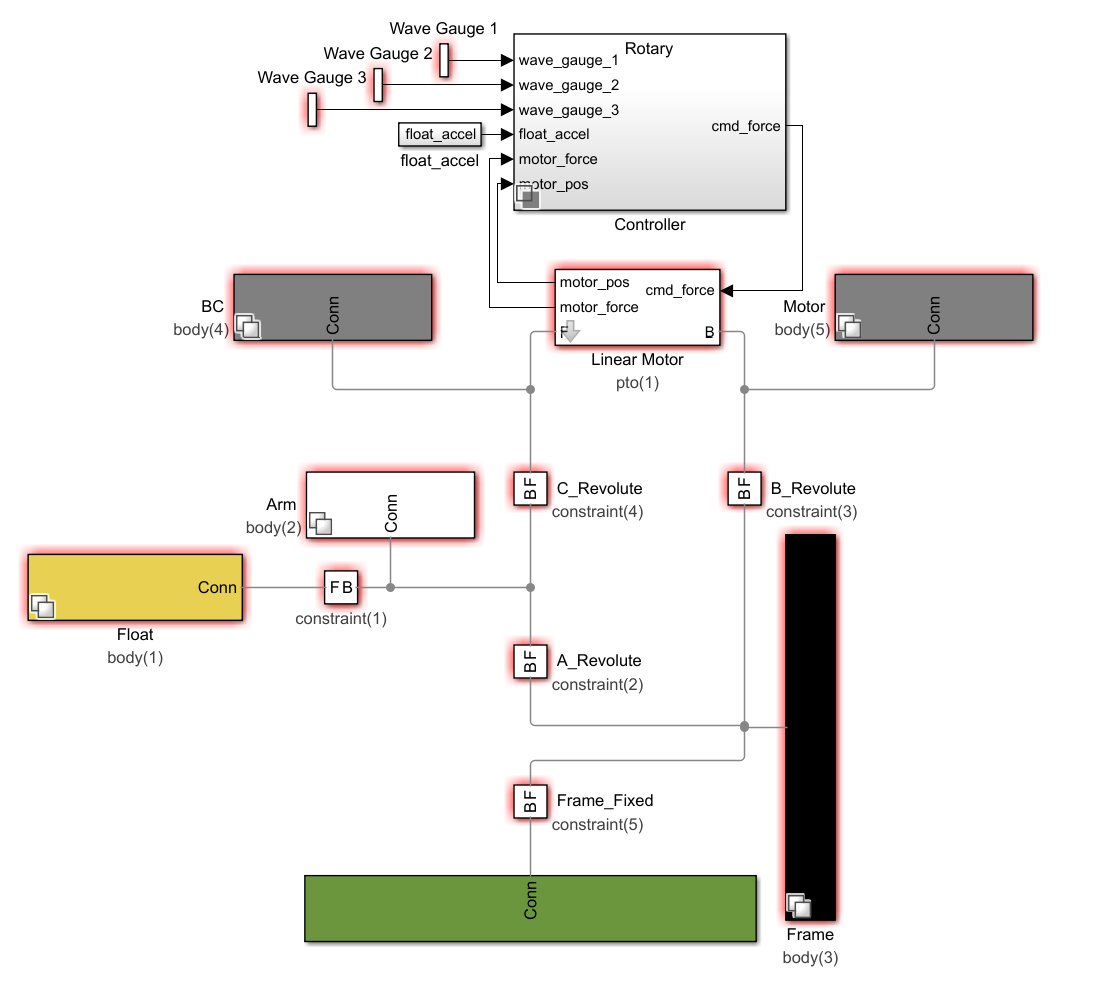
Block diagram of the WECCCOMP device with advanced controller.
Together with PTO and control systems, WEC-Sim is able to model a wide variety of marine devices. The WEC-Sim Applications repository contains a wide variety of scenarios that WEC-Sim can model. This repository includes both demonstrations of WEC-Sim’s advanced features and applications of WEC-Sim to unique devices.
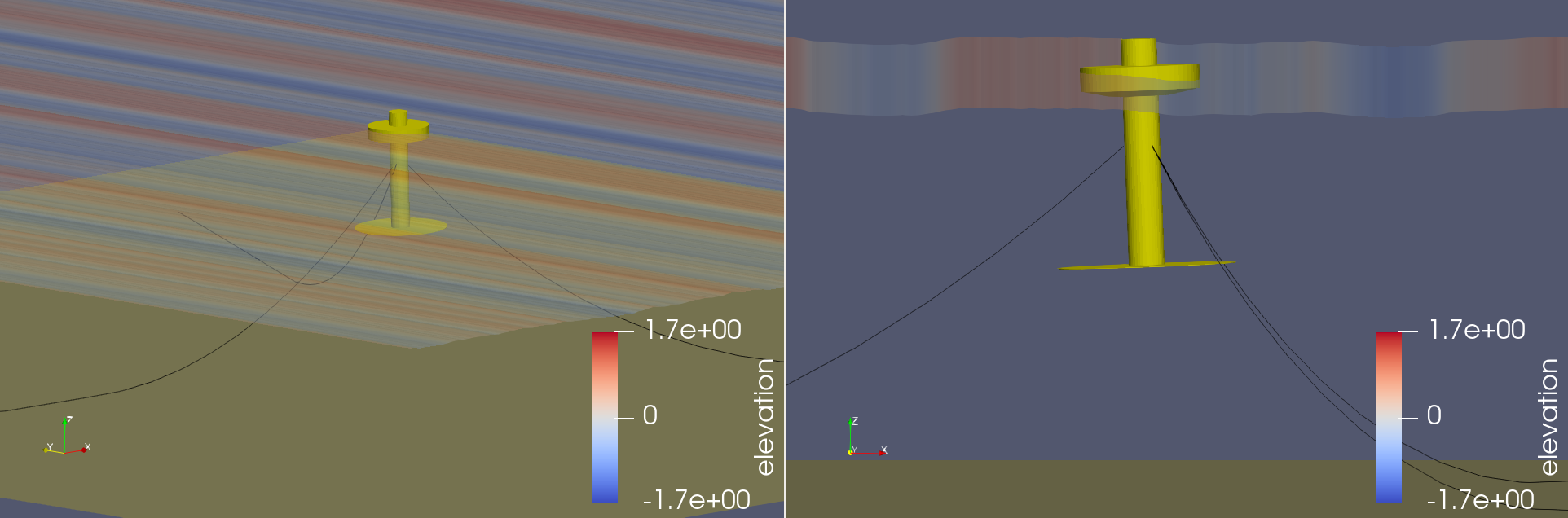
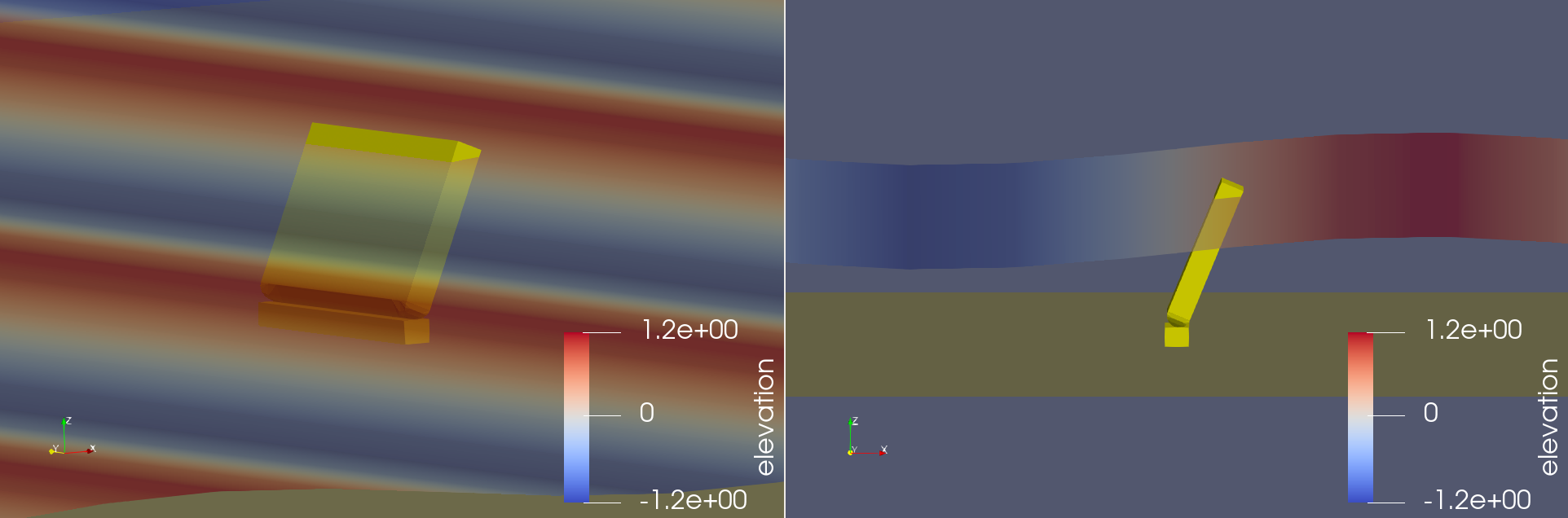
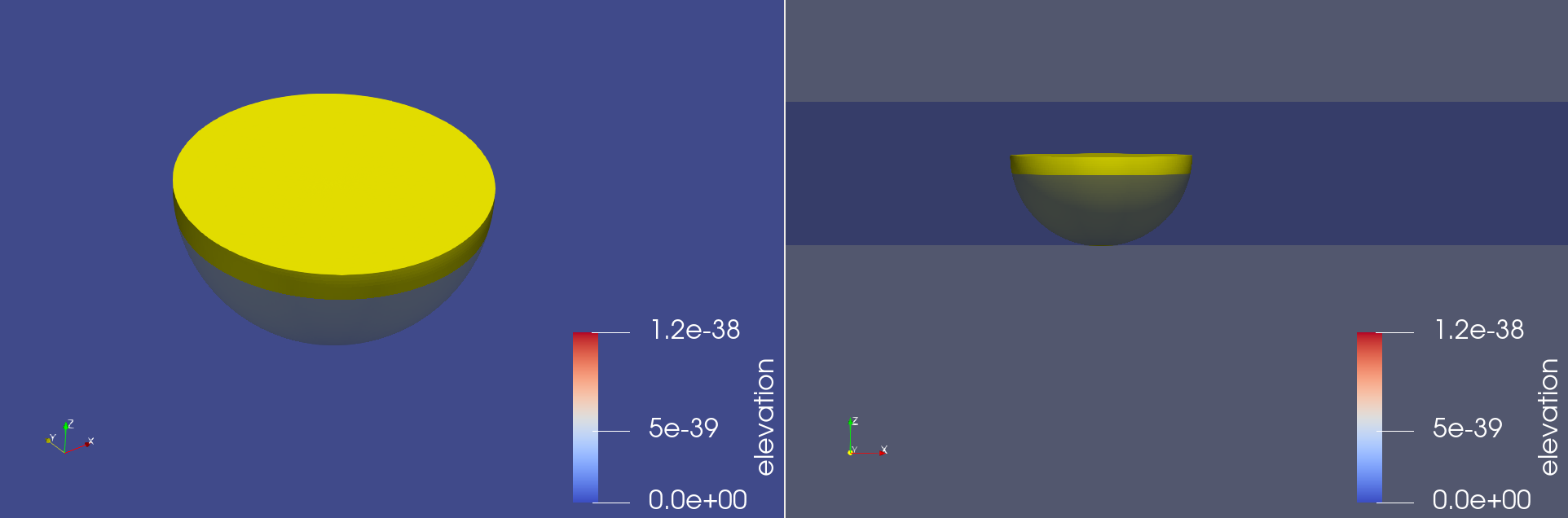
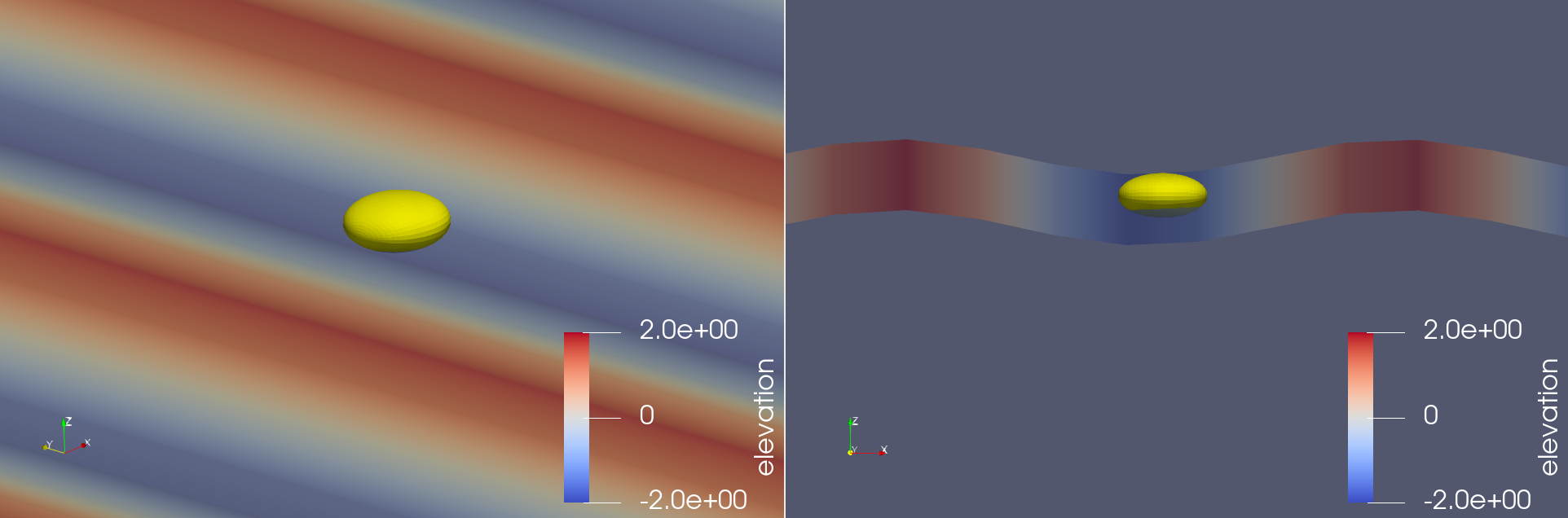
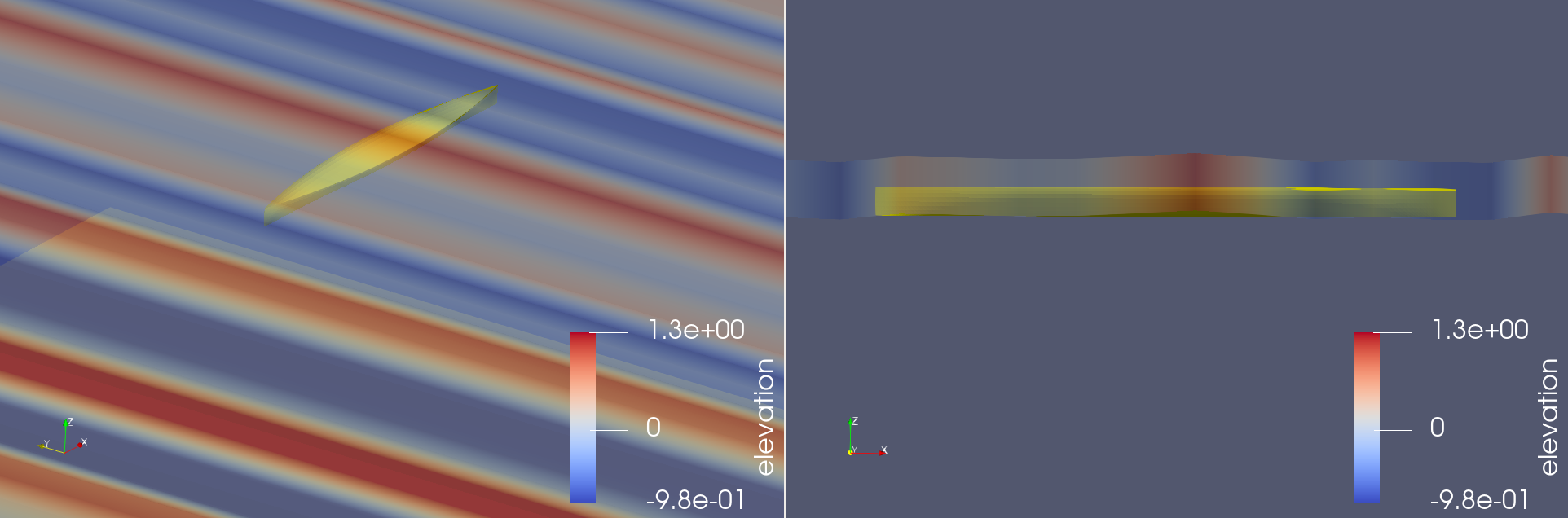
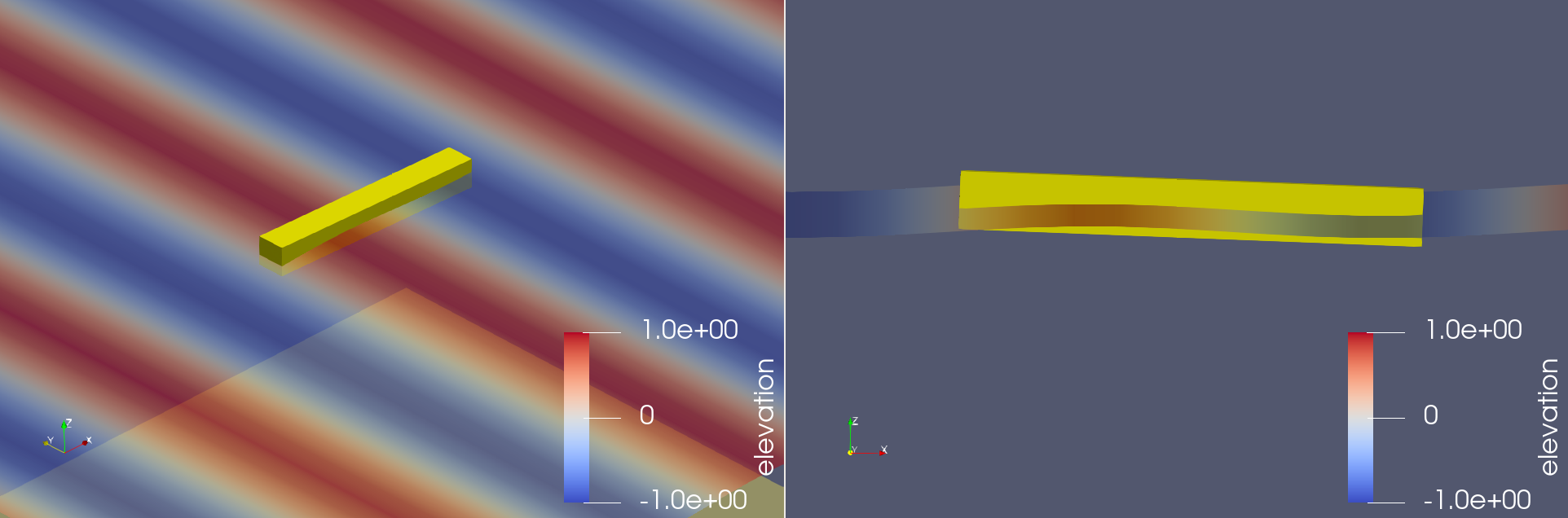
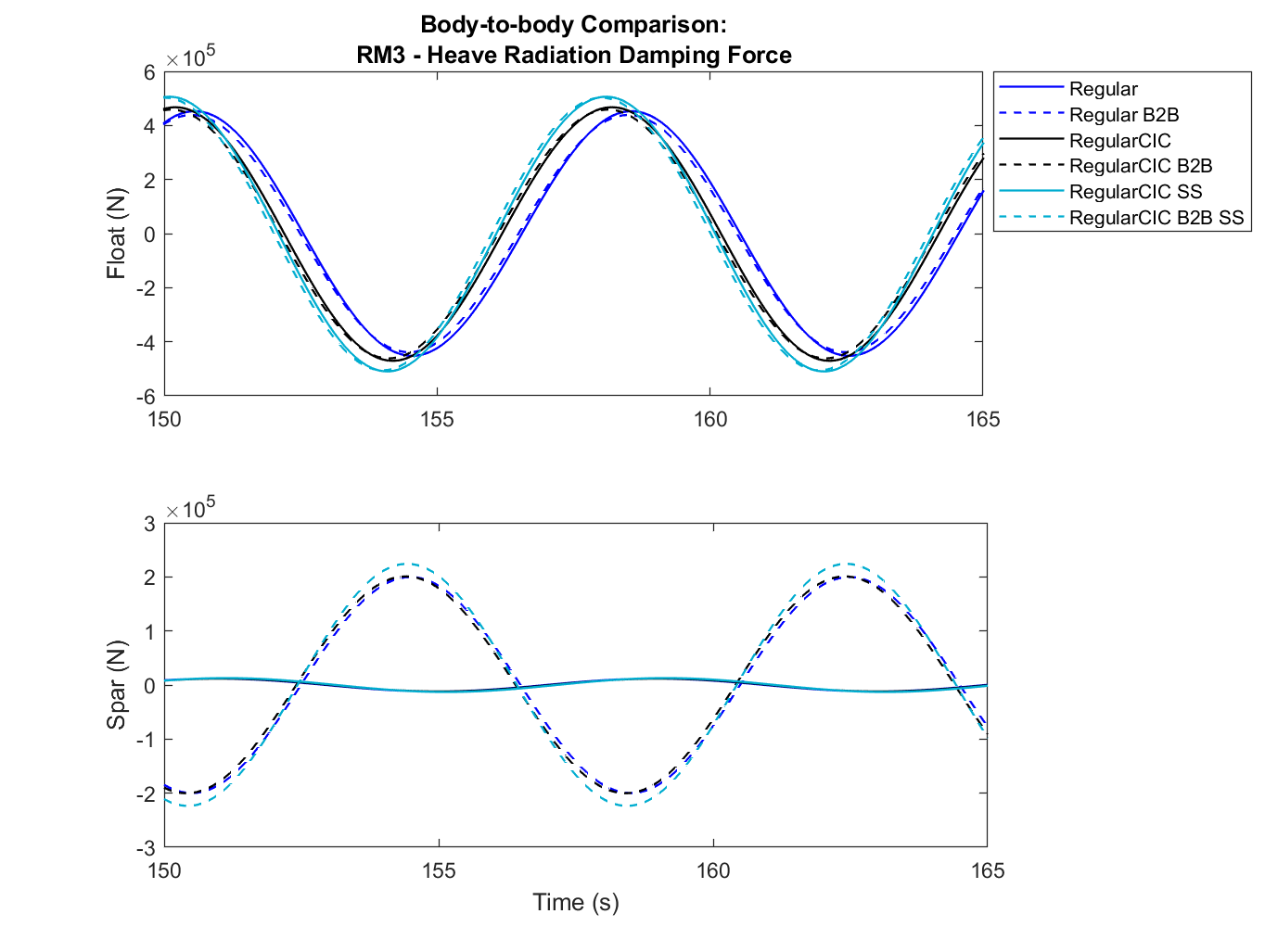
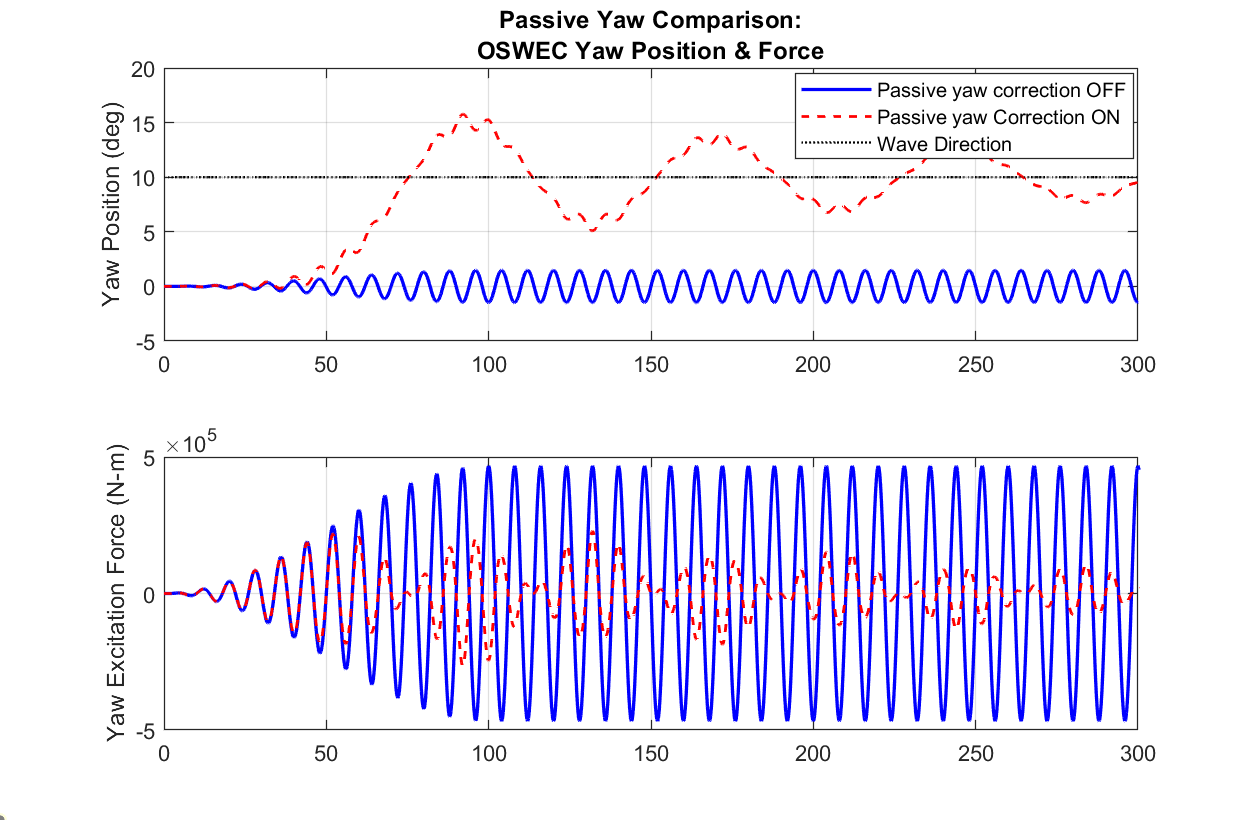
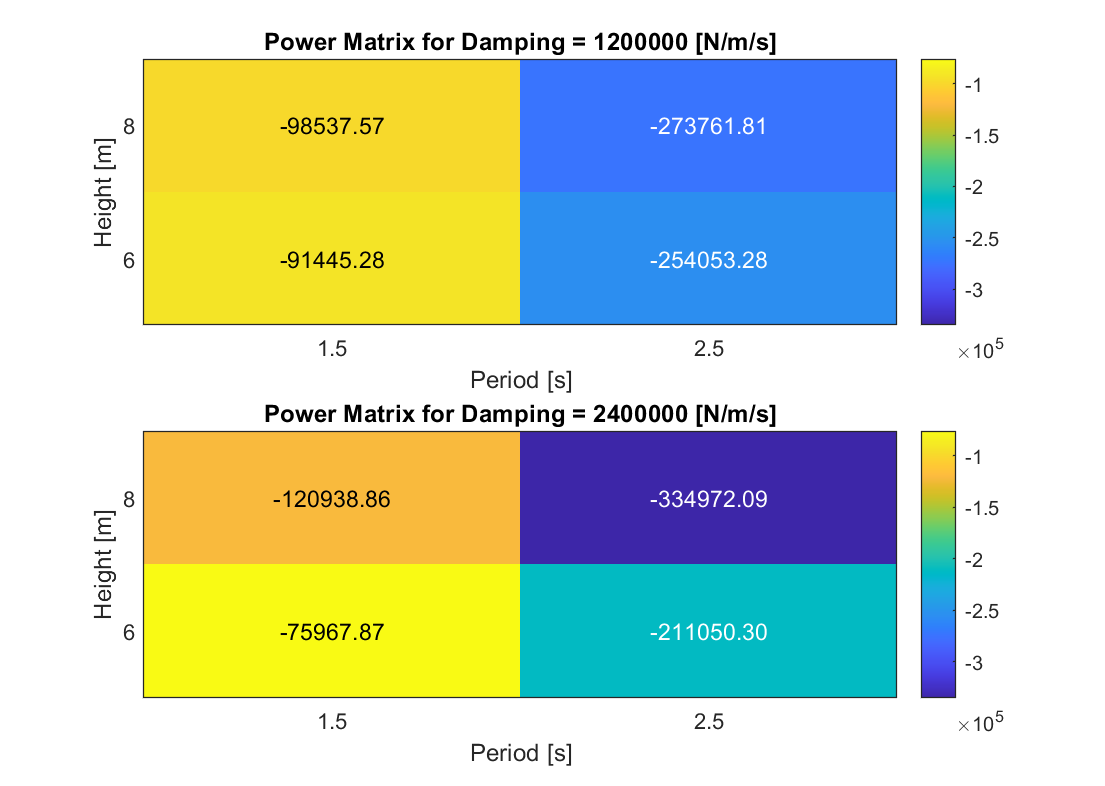
WEC-Sim’s capabilities include the ability to model both nonlinear hydrodynamic effects (Froude-Krylov forces and hydrostatic stiffness) and nonhydrodynamic bodies, body-to-body interactions, mooring systems, passive yawing. WEC-Sim contains numerous numerical options and ability to perform highly customizable batch simulations. WEC-Sim can take in data from a variety of boundary element method software using its BEMIO (BEM-in/out) functionality and can output paraview files for visualization. Some of its advanced features are highlighted in the figures below.
Advanced Features Demonstration |
|
|---|---|
|
|
|
|
|
|



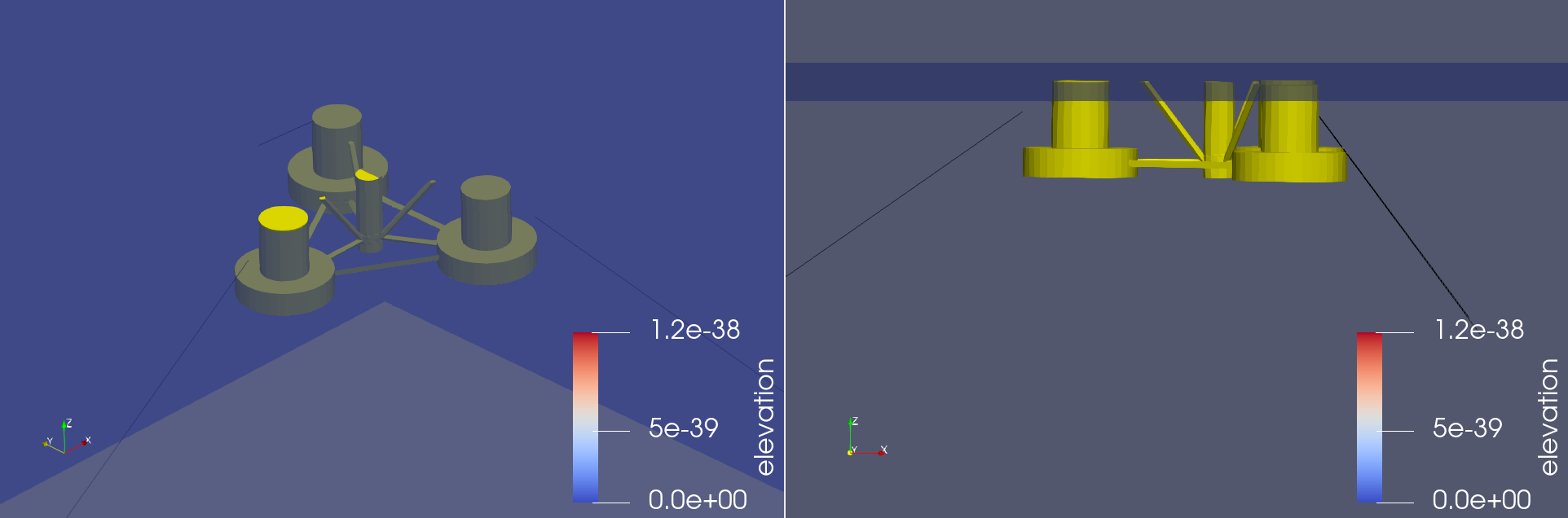
WEC-Sim can model a wide variety of marine renewable energy and offshore devices. The figures below highlight a small sample of devices that WEC-Sim has successfully modeled in the past.
Sample of devices that have been with WEC-Sim |
|
|---|---|
|
|
|
|
|
|
|
|