Getting Started
This section provides instructions on how to download and install WEC-Sim.
MATLAB Requirements
WEC-Sim is developed in MATLAB/Simulink and requires the following toolboxes:
MATLAB
Simulink
Simscape
Simscape Multibody
WEC-Sim is tested on and compatible with the four latest releases of MATLAB. WEC-Sim’s Simulink Library is saved in MATLAB R2020b to enable users to use the library files in a wider range of MATLAB versions. WEC-Sim may be compatible with MATLAB versions R2020b and later, but this is not guaranteed except for the four latest versions. The stability of each MATLAB release is available via WEC-Sim’s GitHub Actions. Certain advanced features and applications rely on external functions (such as MoorDyn) and additional MATLAB Toolboxes (such as Parallel Computing Toolbox (PCT)).
Verify that the MATLAB required toolboxes are installed by typing ver in the MATLAB Command Window:
>> ver
-----------------------------------------------------------------------------------------------------
MATLAB Version: 25.1.0.2943329 (R2025a)
-----------------------------------------------------------------------------------------------------
MATLAB Version 25.1 (R2025a)
Simulink Version 25.1 (R2025a)
Simscape Version 25.1 (R2025a)
Simscape Multibody Version 25.1 (R2025a)
Download WEC-Sim
The WEC-Sim source code is hosted on WEC-Sim’s GitHub repository.
WEC-Sim users should clone WEC-Sim’s Github repository.
Cloning the repository allows users to easily pull the latest updates to the WEC-Sim source code.
The WEC-Sim source code can be cloned by installing Git Large File Storage (git lfs) to access large files (e.g. *.h5 files), and cloning the WEC-Sim GitHub repository.
To install WEC-Sim using git:
>> git lfs install
>> git clone https://github.com/WEC-Sim/WEC-Sim
The local copy of WEC-Sim can easily be updated to include updates from the main version of the WEC-Sim source code hosted on the GitHub by using the git pull command:
>> git pull origin main
For users who are new to git, it is recommended to go through examples on GitHub or other sources while getting started. If you have problems downloading or installing please see the Troubleshooting page.
For developers who wish to contribute to WEC-Sim, refer to the Developer Getting Started section.
Note
Users may also download a static version of WEC-Sim from the latest tagged WEC-Sim Release. This is the easiest way to obtain the WEC-Sim code, however users must manually download new releases for updates.
Install WEC-Sim
Once you have downloaded the WEC-Sim source code, take the following steps to install WEC-Sim.
The directory where the WEC-Sim source code is saved is referred to as $WECSIM (e.g. C:/User/Documents/GitHub/WEC-Sim).
Step 1. Add WEC-Sim to the MATLAB Path
To run WEC-Sim, the source directory must be on the MATLAB path. Users have two options to do this:
Option 1. Automatically add the WEC-Sim source on MATLAB startup.
Open $WECSIM/source/addWecSimSource.m and copy contents to a new file called startup.m.
Set the WEC-Sim path to the local $WECSIM/source directory, e.g. wecSimSource = 'C:/User/Documents/GitHub/WEC-Sim/source.
Save startup.m to the MATLAB Startup Folder.
Restart MATLAB, and the $WECSIM/source directory will automatically be added to the MATLAB path.
% This script adds the WEC-Sim source to the MATLAB path.
% Define WEC-Sim source and add to MATLAB path
wecSimSource = fullfile(pwd,'source');
addpath(genpath(wecSimSource));
% Allow opening of Simulink models saved in a newer version
set_param(0, 'ErrorIfLoadNewModel', 'off')
clear wecSimSource
Option 2. Manually add and remove the WEC-Sim source from the MATLAB path.
This option requires users to run a script each time MATLAB is opened to add the WEC-Sim source directory to the path.
Navigate to the $WECSIM directory and run addWecSimSource.
The $WECSIM/source directory will then be added to the MATLAB path for this instance of MATLAB.
To remove WEC-Sim from the path, run removeWecSimSource.
Step 2. Verify the Path
Verify the path was set up correctly by checking that the WEC-Sim source directory is listed in the MATLAB search path.
The WEC-Sim source directory, $WECSIM/source, and its subfolders should be listed.
To view the MATLAB path, type path in the MATLAB Command Window:
>> path
MATLABPATH
C:/User/Documents/GitHub/WEC-Sim/source
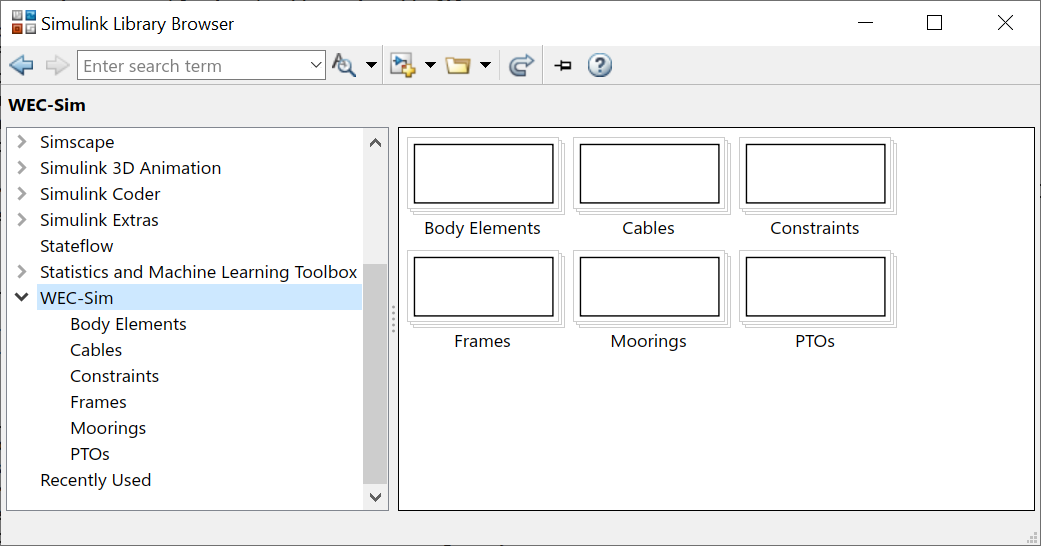
Step 3. Add WEC-Sim Library to Simulink
Open the Simulink Library Browser by typing slLibraryBrowser in the MATLAB
Command Window:
>> slLibraryBrowser
Once the Simulink Library Browser opens, refresh the Simulink Library. The WEC-Sim Library should now be visible, as shown in the figure below. The WEC-Sim Library will now be accessible every time Simulink is opened. For more information on using and modifying library blocks refer to the Simulink Documentation.
Step 4. Test the Installation
Both users and contributors can test the installation using the following steps. In the MATLAB Command Window type:
>> cd $WECSIM/examples/RM3
>> wecSim
This should run an example case using the Reference Model 3 (RM3) point absorber.
A Mechanics Explorer window will open within the MATLAB window, and figures will be generated displaying simulation outputs.
Both the RM3 and the OSWEC examples ($WECSIM/examples/OSWEC) come ready-to-run and can be used once WEC-Sim is installed.
Note
If a git lfs error is produced, there was a problem with git-lfs
installation. You may need to manually install Git Large File
Storage , or run
$WECSIM/examples/RM3/hydroData/bemio.m to generate the correct
rm3.h5 file.